SAPIEN
SAPIEN: A SimulAted Part-based Interactive ENvironment




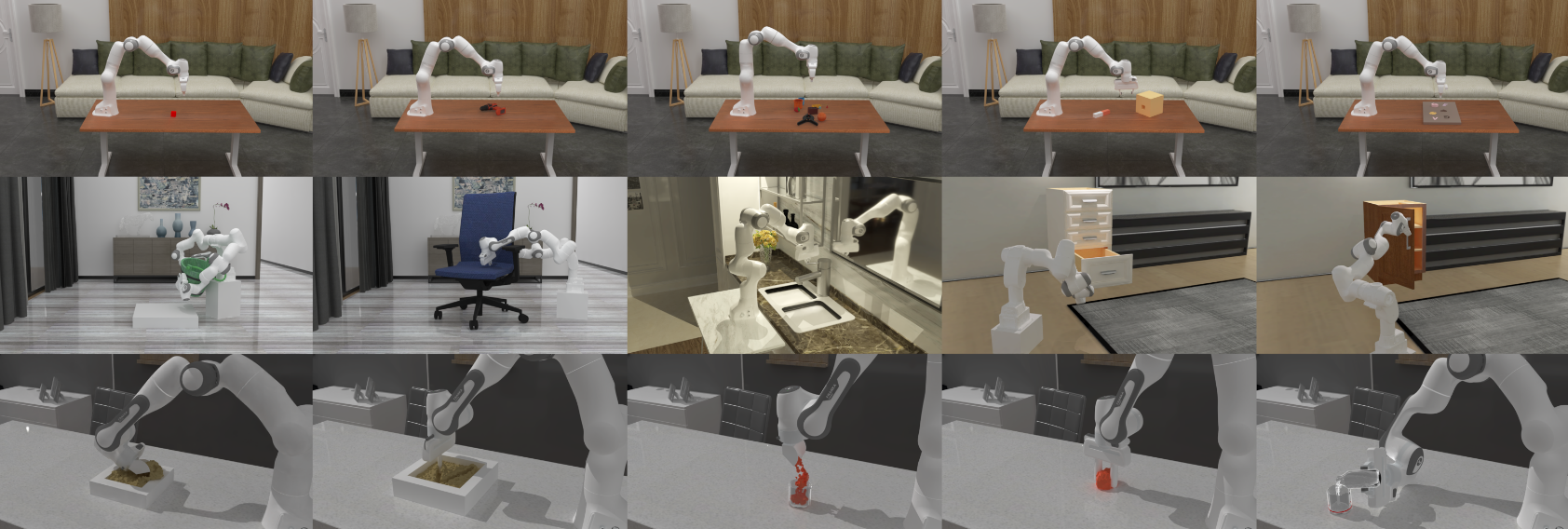
SAPIEN simulator provides GPU parallelized diverse physical simulation for robots, rigidbody, and articulated objects. It also supports GPU parallelized rendering, supporting fast visual data collection. It also provides multiple rendering modalities, including depth map, normal map, optical flow, active light, and ray tracing. The ManiSkill framework built on top of SAPIEN provides pre-built tasks for robot learning workflows as well as an API to build custom tasks for many robotics domains.
Official Materials
Related Benchmarks
ManiSkill
ManiSkill embraces a heterogeneous collection of out-of-the-box GPU parallelized task families for manipulation skills, locomotion, humanoids, and standard control tasks. For manipulation, several types of tasks are covered: stationary/mobile-base, single/dual-arm, rigid/soft-body.
Related Projects
- CVPR2023: GAPartNet: Cross-Category Domain-Generalizable Object Perception and Manipulation via Generalizable and Actionable Parts: SAPIEN; RGB-D PointCloud
- IROS2022(RA-L): Maniskill: Generalizable manipulation skill benchmark with large-scale demonstrations: SAPIEN; PointCloud