Articulation
Articulated objects and robots are always described using XML files. URDF(Unified Robot Description Format) is the most popular one used in robotics for describing the structure and properties of a robot. Here we provide code for articulation parsing, calculation and so on.
Query a Link from URDF file
To query a link in a URDF file, we provide code using urdfpy and xml parser.
- urdfpy
from urdfpy import URDF
# Load URDF file
robot = URDF.load('path_to_urdf_file.urdf')
# Query a link by name
link_name = 'desired_link_name'
link = robot.link_map[link_name]
# Access link properties
print(f"Link name: {link.name}")
print(f"Link inertia: {link.inertia}") - xml
import xml.etree.ElementTree as ET
# Load and parse the URDF file
tree = ET.parse('path_to_urdf_file.urdf')
root = tree.getroot()
# Query a link by name
link_name = 'desired_link_name'
link = root.find(f".//link[@name='{link_name}']")
if link is not None:
print(f"Found link: {link.get('name')}")
else:
print("Link not found")
Query a Joint from URDF file
To query a joint in a URDF file, we provide code using urdfpy and xml parser.
urdfpy
from urdfpy import URDF
# Load URDF file
robot = URDF.load('path_to_urdf_file.urdf')
# Query a joint by name
joint_name = 'desired_joint_name'
joint = robot.joint_map[joint_name]
# Access joint properties
print(f"Joint name: {joint.name}")
print(f"Joint type: {joint.joint_type}")xml
import xml.etree.ElementTree as ET
# Load and parse the URDF file
tree = ET.parse('path_to_urdf_file.urdf')
root = tree.getroot()
# Query a joint by name
joint_name = 'desired_joint_name'
joint = root.find(f".//joint[@name='{joint_name}']")
if joint is not None:
print(f"Found joint: {joint.get('name')}")
else:
print("Joint not found")
Merging URDF Geometries to OBJ
To merge URDF geometries to an OBJ file, we provide code using xml parser. This code still needs testing.
import xml.etree.ElementTree as ET
import trimesh
import numpy as np
def parse_origin(element):
"""Parse the origin XML element to extract position and rotation."""
if element is None:
return np.eye(4) # Return identity matrix if no origin is specified
xyz = element.get('xyz', '0 0 0').split()
rpy = element.get('rpy', '0 0 0').split()
xyz = [float(val) for val in xyz]
rpy = [float(val) for val in rpy]
# Compute the transformation matrix from position and rotation (roll, pitch, yaw)
translation_matrix = trimesh.transformations.translation_matrix(xyz)
rotation_matrix = trimesh.transformations.euler_matrix(*rpy)
return trimesh.transformations.concatenate_matrices(translation_matrix, rotation_matrix)
# Load and parse the URDF file
tree = ET.parse('path_to_urdf_file.urdf')
root = tree.getroot()
# Initialize an empty scene
scene = trimesh.Scene()
# Iterate through each link and process its geometry
for link in root.findall('link'):
for visual in link.findall('visual'):
origin = visual.find('origin')
transform = parse_origin(origin)
geometry = visual.find('geometry')
mesh_element = geometry.find('mesh')
if mesh_element is not None:
mesh_filename = mesh_element.get('filename')
# Load the mesh and apply transformation
loaded_mesh = trimesh.load(mesh_filename)
loaded_mesh.apply_transform(transform)
scene.add_geometry(loaded_mesh)
# Export the scene to an OBJ file
scene.export('output.obj')
Batch-Processed URDF Forward Kinematics
To facilitate batch processing of URDF forward kinematics, we present the code for the HandModel class, which is primarily derived from a modified version of pytorch_kinematics.
We offer a straightforward example showcasing the utilization of the HandModel class to derive the Forward Kinematics (FK) merged mesh of the ShadowHand robot. You can find the demo required asset from shadow-robot.
class.HandModel for batch FK
import os
import torch
import numpy as np
import trimesh as tm
import trimesh.sample
import transforms3d
import pytorch_kinematics as pk
from pytorch_kinematics.urdf_parser_py.urdf import (URDF, Box, Cylinder, Mesh, Sphere)
import urdf_parser_py.urdf as URDF_PARSER
class HandModel:
def __init__(self, robot_name, urdf_filename, mesh_path,
batch_size=1,
device=torch.device('cuda' if torch.cuda.is_available() else 'cpu'),
mesh_nsp=128,
hand_scale=1.
):
self.device = device
self.robot_name = robot_name
self.batch_size = batch_size
self.mesh_nsp = mesh_nsp
# prepare model
self.robot = pk.build_chain_from_urdf(open(urdf_filename).read()).to(dtype=torch.float, device=self.device)
self.robot_full = URDF_PARSER.URDF.from_xml_file(urdf_filename)
self.global_translation = None
self.global_rotation = None
# prepare surface point samples
self.surface_points = {}
self.surface_points_normal = {}
visual = URDF.from_xml_string(open(urdf_filename).read())
self.mesh_verts = {}
self.mesh_faces = {}
self.canon_verts = []
self.canon_faces = []
self.idx_vert_faces = []
self.face_normals = []
for i_link, link in enumerate(visual.links):
print(f"Processing link #{i_link}: {link.name}")
# load mesh
if len(link.visuals) == 0:
continue
if type(link.visuals[0].geometry) == Mesh:
# print(link.visuals[0])
if robot_name == 'shadowhand':
filename = link.visuals[0].geometry.filename.split('/')[-1]
else:
raise NotImplementedError
mesh = tm.load(os.path.join(mesh_path, filename), force='mesh', process=False)
elif type(link.visuals[0].geometry) == Cylinder:
mesh = tm.primitives.Cylinder(
radius=link.visuals[0].geometry.radius, height=link.visuals[0].geometry.length)
elif type(link.visuals[0].geometry) == Box:
mesh = tm.primitives.Box(extents=link.visuals[0].geometry.size)
elif type(link.visuals[0].geometry) == Sphere:
mesh = tm.primitives.Sphere(
radius=link.visuals[0].geometry.radius)
else:
print(type(link.visuals[0].geometry))
raise NotImplementedError
try:
scale = np.array(
link.visuals[0].geometry.scale).reshape([1, 3])
except:
scale = np.array([[1, 1, 1]])
try:
rotation = transforms3d.euler.euler2mat(*link.visuals[0].origin.rpy)
translation = np.reshape(link.visuals[0].origin.xyz, [1, 3])
except AttributeError:
rotation = transforms3d.euler.euler2mat(0, 0, 0)
translation = np.array([[0, 0, 0]])
# Surface point
# mesh.sample(int(mesh.area * 100000)) * scale
if self.robot_name == 'shadowhand':
pts, pts_face_index = trimesh.sample.sample_surface(mesh=mesh, count=self.mesh_nsp)
pts_normal = np.array([mesh.face_normals[x] for x in pts_face_index], dtype=float)
else:
raise NotImplementedError
pts *= scale
if robot_name == 'shadowhand':
pts = pts[:, [0, 2, 1]]
pts_normal = pts_normal[:, [0, 2, 1]]
pts[:, 1] *= -1
pts_normal[:, 1] *= -1
pts = np.matmul(rotation, pts.T).T + translation
pts = np.concatenate([pts, np.ones([len(pts), 1])], axis=-1)
pts_normal = np.concatenate([pts_normal, np.ones([len(pts_normal), 1])], axis=-1)
self.surface_points[link.name] = torch.from_numpy(pts).to(
device).float().unsqueeze(0).repeat(batch_size, 1, 1)
self.surface_points_normal[link.name] = torch.from_numpy(pts_normal).to(
device).float().unsqueeze(0).repeat(batch_size, 1, 1)
# visualization mesh
self.mesh_verts[link.name] = np.array(mesh.vertices) * scale
if robot_name == 'shadowhand':
self.mesh_verts[link.name] = self.mesh_verts[link.name][:, [0, 2, 1]]
self.mesh_verts[link.name][:, 1] *= -1
self.mesh_verts[link.name] = np.matmul(rotation, self.mesh_verts[link.name].T).T + translation
self.mesh_faces[link.name] = np.array(mesh.faces)
self.revolute_joints = []
for i in range(len(self.robot_full.joints)):
if self.robot_full.joints[i].joint_type == 'revolute':
self.revolute_joints.append(self.robot_full.joints[i])
self.revolute_joints_q_mid = []
self.revolute_joints_q_var = []
self.revolute_joints_q_upper = []
self.revolute_joints_q_lower = []
for i in range(len(self.robot.get_joint_parameter_names())):
for j in range(len(self.revolute_joints)):
if self.revolute_joints[j].name == self.robot.get_joint_parameter_names()[i]:
joint = self.revolute_joints[j]
assert joint.name == self.robot.get_joint_parameter_names()[i]
self.revolute_joints_q_mid.append(
(joint.limit.lower + joint.limit.upper) / 2)
self.revolute_joints_q_var.append(
((joint.limit.upper - joint.limit.lower) / 2) ** 2)
self.revolute_joints_q_lower.append(joint.limit.lower)
self.revolute_joints_q_upper.append(joint.limit.upper)
self.revolute_joints_q_lower = torch.Tensor(self.revolute_joints_q_lower).repeat([self.batch_size, 1]).to(device)
self.revolute_joints_q_upper = torch.Tensor(self.revolute_joints_q_upper).repeat([self.batch_size, 1]).to(device)
self.current_status = None
self.scale = hand_scale
@staticmethod
def _rotation_matrix_from_rpy(rpy_batch):
# Convert batched rpy to rotation matrices using PyTorch
roll, pitch, yaw = torch.unbind(rpy_batch, dim=-1)
cos_r, sin_r = torch.cos(roll), torch.sin(roll)
cos_p, sin_p = torch.cos(pitch), torch.sin(pitch)
cos_y, sin_y = torch.cos(yaw), torch.sin(yaw)
r11 = cos_y * cos_p
r12 = cos_y * sin_p * sin_r - sin_y * cos_r
r13 = cos_y * sin_p * cos_r + sin_y * sin_r
r21 = sin_y * cos_p
r22 = sin_y * sin_p * sin_r + cos_y * cos_r
r23 = sin_y * sin_p * cos_r - cos_y * sin_r
r31 = -sin_p
r32 = cos_p * sin_r
r33 = cos_p * cos_r
rotation_matrix = torch.stack([r11, r12, r13, r21, r22, r23, r31, r32, r33], dim=-1)
rotation_matrix = rotation_matrix.view(*rpy_batch.shape[:-1], 3, 3)
return rotation_matrix
def update_kinematics(self, q):
self.global_translation = q[:, :3]
self.global_rotation = self._rotation_matrix_from_rpy(q[:, 3:6])
self.current_status = self.robot.forward_kinematics(q[:, 6:])
def get_surface_points(self, q=None):
if q is not None:
self.update_kinematics(q)
surface_points = []
for link_name in self.surface_points:
# for link_name in parts:
# get transformation
trans_matrix = self.current_status[link_name].get_matrix()
surface_points.append(torch.matmul(trans_matrix, self.surface_points[link_name].transpose(1, 2)).transpose(1, 2)[..., :3])
surface_points = torch.cat(surface_points, 1)
surface_points = torch.matmul(self.global_rotation, surface_points.transpose(1, 2)).transpose(1, 2) + self.global_translation.unsqueeze(1)
return surface_points * self.scale
def get_surface_points_and_normals(self, q=None):
if q is not None:
self.update_kinematics(q=q)
surface_points = []
surface_normals = []
for link_name in self.surface_points:
# for link_name in parts:
# get transformation
trans_matrix = self.current_status[link_name].get_matrix()
surface_points.append(torch.matmul(trans_matrix, self.surface_points[link_name].transpose(1, 2)).transpose(1, 2)[..., :3])
surface_normals.append(torch.matmul(trans_matrix, self.surface_points_normal[link_name].transpose(1, 2)).transpose(1, 2)[..., :3])
surface_points = torch.cat(surface_points, 1)
surface_normals = torch.cat(surface_normals, 1)
surface_points = torch.matmul(self.global_rotation, surface_points.transpose(1, 2)).transpose(1, 2) + self.global_translation.unsqueeze(1)
surface_normals = torch.matmul(self.global_rotation, surface_normals.transpose(1, 2)).transpose(1, 2)
return surface_points * self.scale, surface_normals
def get_meshes_from_q(self, q=None, i=0):
meshes = []
if q is not None: self.update_kinematics(q)
for idx, link_name in enumerate(self.mesh_verts):
trans_matrix = self.current_status[link_name].get_matrix()
trans_matrix = trans_matrix[min(len(trans_matrix) - 1, i)].detach().cpu().numpy()
v = self.mesh_verts[link_name]
transformed_v = np.concatenate([v, np.ones([len(v), 1])], axis=-1)
transformed_v = np.matmul(trans_matrix, transformed_v.T).T[..., :3]
transformed_v = np.matmul(self.global_rotation[i].detach().cpu().numpy(),
transformed_v.T).T + np.expand_dims(
self.global_translation[i].detach().cpu().numpy(), 0)
transformed_v = transformed_v * self.scale
f = self.mesh_faces[link_name]
meshes.append(tm.Trimesh(vertices=transformed_v, faces=f))
return meshes
if __name__ == '__main__':
seed = 42
np.random.seed(seed)
batchsize = 4
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
hand_model = HandModel(robot_name='shadowhand',
urdf_filename='assets/sr_grasp_description/urdf/shadowhand.urdf',
mesh_path='assets/sr_grasp_description/meshes',
batch_size=batchsize, device=device, hand_scale=1.0)
print(len(hand_model.robot.get_joint_parameter_names()))
joint_lower = np.array(hand_model.revolute_joints_q_lower.cpu().reshape(batchsize, -1))
joint_upper = np.array(hand_model.revolute_joints_q_upper.cpu().reshape(batchsize, -1))
joint_mid = (joint_lower + joint_upper) / 2
joints_q = joint_mid
q = torch.concatenate([torch.zeros([batchsize, 6], device=device), torch.from_numpy(joints_q).to(device)], dim=-1)
# hand_model.get_surface_points(q)
hand_model.get_surface_points(q)
meshes = hand_model.get_meshes_from_q(q)
meshes = tm.util.concatenate(meshes)
meshes.show()
Speed Things Up with Hand-Written FK
While the pytorch_kinematics package provides a user-friendly method for executing batched forward kinematics, its current implementation exhibits inefficiencies. For instance, when converting a joint angle to the joint rotation of a revolute joint, it initially translates the axis-angle representation to quaternions. Following this step, it constructs a pytorch_kinematics.transforms.Transforms3d object, which subsequently converts the quaternions into rotation matrices.
class.Frame for converting joint angle to joint rotation
def get_transform(self, theta):
dtype = self.joint.axis.dtype
d = self.joint.axis.device
if self.joint.joint_type == 'revolute':
t = tf.Transform3d(rot=tf.axis_angle_to_quaternion(theta * self.joint.axis), dtype=dtype, device=d) # this line converts theta to quaternions then to rotation matrix
elif self.joint.joint_type == 'prismatic':
t = tf.Transform3d(pos=theta * self.joint.axis, dtype=dtype, device=d)
elif self.joint.joint_type == 'fixed':
t = tf.Transform3d(default_batch_size=theta.shape[0], dtype=dtype, device=d)
else:
raise ValueError("Unsupported joint type %s." % self.joint.joint_type)
return self.joint.offset.compose(t)
Furthermore, the handling of transformation composition within pk is inappropriate, leading to increased computational complexity. When composing multiple Transforms3d objects, pk stores all these objects in a list and multiplies them successively upon calling get_matrix. Consequently, for the nth joint on a kinematic chain, pk performs 2*n matrix multiplications when invoking get_matrix, whereas it could achieve the same outcome with only 2 matrix multiplications by reusing the composed transformation matrix from the preceding joint.
class.Transforms3d for transformation composition
def compose(self, *others):
"""
Return a new Transform3d with the tranforms to compose stored as
an internal list.
Args:
*others: Any number of Transform3d objects
Returns:
A new Transform3d with the stored transforms
"""
out = Transform3d(device=self.device, dtype=self.dtype)
out._matrix = self._matrix.clone()
for other in others:
if not isinstance(other, Transform3d):
msg = "Only possible to compose Transform3d objects; got %s"
raise ValueError(msg % type(other))
out._transforms = self._transforms + list(others)
return out
return out
def get_matrix(self):
"""
Return a matrix which is the result of composing this transform
with others stored in self.transforms. Where necessary transforms
are broadcast against each other.
For example, if self.transforms contains transforms t1, t2, and t3, and
given a set of points x, the following should be true:
.. code-block:: python
y1 = t1.compose(t2, t3).transform(x)
y2 = t3.transform(t2.transform(t1.transform(x)))
y1.get_matrix() == y2.get_matrix()
Returns:
A transformation matrix representing the composed inputs.
"""
composed_matrix = self._matrix.clone()
if len(self._transforms) > 0:
for other in self._transforms:
other_matrix = other.get_matrix()
composed_matrix = _broadcast_bmm(composed_matrix, other_matrix)
return composed_matrix
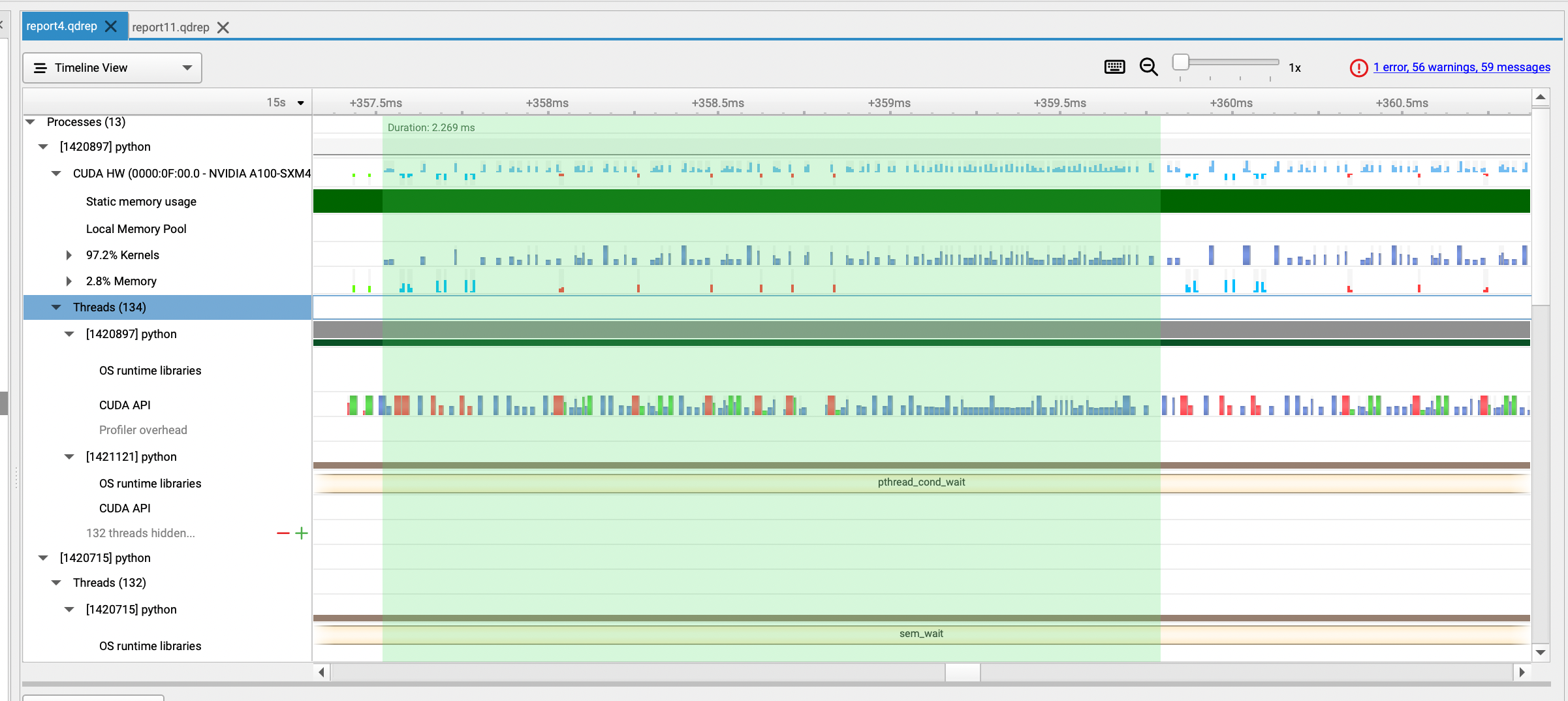
Additionally, pk employs multiple layers of encapsulation, resulting in overhead, particularly when all the code is composed in Python. While attempting to accelerate batched forward kinematics (FK) using GPU, pk generates a sequence of small CUDA kernels interspersed with gaps to dispatch these kernels and advance the Python code. In cases where gradients are necessary during FK, this process is reiterated during the backward pass. As forward kinematics necessitates sequential computation, this overhead becomes notably severe, potentially evolving into the primary bottleneck during the entire training or optimization iteration.
To mitigate these inefficiencies, it's recommended to integrating forward kinematics directly within the class.HandModel. Optimize by directly converting axis angles to rotation matrices. But avoid using pytorch3d.transforms.axis_angle_to_matrix since it also uses quaternions as an inefficient intermediate. Additionally, be sure to reuse the translation and rotation from the parent joint. The rest is straightforward.
optimized update_kinematics method for class.HandModel
def update_kinematics(self, hand_pose):
self.hand_pose = hand_pose
if self.hand_pose.requires_grad:
self.hand_pose.retain_grad()
self.global_translation = self.hand_pose[:, 0:3]
self.global_rotation = robust_compute_rotation_matrix_from_ortho6d(self.hand_pose[:, 3:9])
batch_size = len(self.hand_pose)
self.local_translations = {}
self.local_rotations = {}
self.local_translations[self.joints_parent[0]] = torch.zeros([batch_size, 3], dtype=torch.float, device=self.device)
self.local_rotations[self.joints_parent[0]] = torch.eye(3, dtype=torch.float, device=self.device).expand(batch_size, 3, 3).contiguous()
for joint_name, j in self.joint_order.items():
i = self.joint_names.index(joint_name)
child_name = self.joints_child[i]
parent_name = self.joints_parent[i]
# reuse parent joint's results
translations = self.local_rotations[parent_name] @ self.joints_translation[i] + self.local_translations[parent_name]
rotations = self.local_rotations[parent_name] @ self.joints_rotation[i]
if self.joints_type[i] == 'revolute':
thetas = self.hand_pose[:, 9 + j].view(batch_size, 1, 1)
K = self.joints_axis_K[i]
joint_rotations = torch.eye(3, dtype=torch.float, device=self.device) + torch.sin(thetas) * K + (1 - torch.cos(thetas)) * (K @ K) # axis-angles to rotation matrices (Rodrigues' rotation formula)
rotations = rotations @ joint_rotations
self.local_translations[child_name] = translations
self.local_rotations[child_name] = rotations