Convex Decomposition
Tutorial for convex decomposition for physical simulation and toolkits for doing that
What is convex decomposition?
Convex decomposition involves breaking down complex, non-convex shape into multiple simpler, convex shapes. Here is an example from CoACD1 showing the original geometry and its corresponding convex decomposition, with each color represent a separate convex mesh.

Why we care about convex decomposition when using simulator?
In simulation, collision detection determines when objects intersect or come into contact. This is particularly important in physical simulations where interactions between objects need to be realistically modeled, such as the contact between object and gripper in robot manipulation and the contact between leg and ground in locomotion of a robot dog.
Collision detection algorithms typically involve two phases: the broad phase and the narrow phase. The broad phase identifies pairs of objects that might be colliding, while the narrow phase accurately calculates whether a collision has occurred and provides additional information like contact points and collision normals. In physics engines, collision detection can take from 10% to 50% of the total computation time, depending on the complexity of the object geometry.
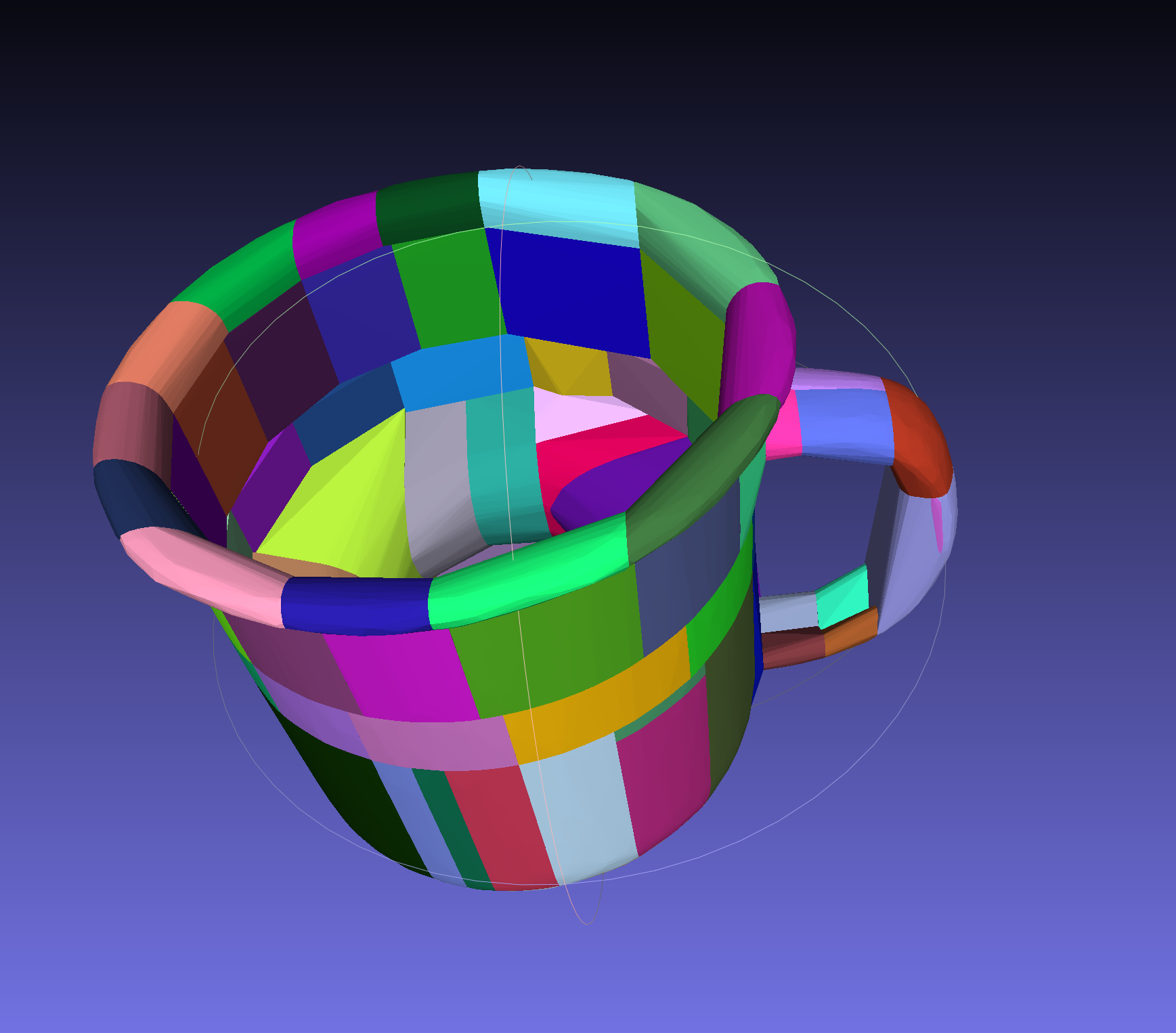
Using convex meshes to represent geometry can accelerate the narrow phase of collision detection, by simplifying the collision detection process, resulting in faster collision detection algorithms compared to the algorithm handling non-convex meshes. Thus, it can enhance the overall performance of physical simulation. Moreover, many simulators automatically convert your imported mesh into a convex hull by default (middle sub-figure below). If convex decomposition isn't performed beforehand, the simulation results might not be as expected. A classic example is a "closed mug" which cannot be used to hold water in the simulation.

Using default convex decomposition algorithm in simulator
Many simulation platforms come integrated with a convex decomposition algorithm that is accessible directly through the simulator's API. For instance, IsaacGym and PyBullet have an in-built implementation of the V-HACD algorithm, while SAPIEN includes the CoCAD algorithm. However, these algorithms are typically disabled by default. Therefore, you might need to enable them and tune the decomposition parameters if the default settings do not yield the desired results.
IsaacGym
You can enable v-hacd when loading asset.
asset_options = gymapi.AssetOptions()
asset_options.vhacd_enabled = True
asset_options.vhacd_params.resolution = 1e6
Full list of tunable parameters in IsaacGym:
class VhacdParams:
alpha: float
beta: float
concavity: float
convex_hull_approximation: bool
convex_hull_downsampling: int
max_convex_hulls: int
max_num_vertices_per_ch: int
min_volume_per_ch: float
mode: 0
ocl_acceleration: bool
pca: int
plane_downsampling: int
project_hull_vertices: bool
resolution: int
SAPIEN
When loading URDF, e.g. cabinet or robot:
loader = scene.create_urdf_loader()
loader.multiple_collisions_decomposition = "coacd"
loader.multiple_collisions_decomposition_params = {}
When loading single link object, e.g. mug:
builder = scene.create_actor_builder()
builder = builder.add_multiple_convex_collisions_from_file(
filename=YOUR_MESH_FILE_PATH,
decomposition="coacd",
decomposition_params=dict(
threshold=0.05,
preprocess_mode="off",
),
)
builder.add_visual_from_file(filename=YOUR_MESH_FILE_PATH)
single_link_object = builder.build()
Full list of CoACD parameters and its default:
threshold = 0.05,
max_convex_hull = -1,
preprocess_mode = "auto",
preprocess_resolution = 30,
resolution = 2000,
mcts_nodes = 20,
mcts_iterations = 150,
mcts_max_depth = 3,
pca = False,
merge = True,
seed = 0,
verbose = False,
PyBullet
Unlike IsaacGym and SAPIEN, PyBullet segregates the process of convex decomposition and object loading into two separate steps. First, you can perform the convex decomposition and save the result to your filesystem. Following this, you can load the decomposed mesh into the simulation using PyBullet's loader function.
import pybullet as p
YOUR_MESH_FILE_PATH = "in.obj"
YOUR_CONVEX_MESH_SAVE_PATH = "out_convex.obj"
p.connect(p.DIRECT)
p.vhacd(YOUR_MESH_FILE_PATH, YOUR_CONVEX_MESH_SAVE_PATH, "log.txt", resolution=1e6)
Standalone convex decomposition
For highly complex geometries, the default parameters of these convex decomposition algorithms may not yield satisfactory results. As such, you might need to adjust the decomposition parameters extensively. In such a scenario, rerunning simulation code each time can be laborious. A more efficient approach is to perform decomposition outside the simulator, evaluate the performance, and once satisfied, import the final output into the simulator. For instance, you can use CoACD in a standalone manner:
pip install coacd
coacd -i INPUT_MESH.obj -o OUTPUT_MESH.obj -t 0.1
You can use MessLab to visualize the results of convex decomposition:
Please note that this command will store multiple convex meshes in a single .obj file. As a result, when using this
convex mesh, you must explicitly inform your simulator that it contains multiple meshes. Failing to do so will cause
your .obj file to be interpreted as a single mesh, which negates the purpose of performing convex
decomposition.
# In IsaacGym
asset_options = gymapi.AssetOptions()
asset_options.convex_decomposition_from_submeshes = True
# In SAPIEN
loader = scene.create_urdf_loader()
loader.load_multiple_collisions_from_file = True
- SIGGRAPH2022: Approximate convex decomposition for 3d meshes with collision-aware concavity and tree search.↩