Soft Body Simulators
Overview
- SoftGym: a set of benchmark environments for deformable object manipulation including tasks involving fluid, cloth and rope, simulated using FleX.
- FluidLab: a fully differentiable and multi-material physics simulation platform, supporting rigid, elastic, plastic materials, inviscid and viscous liquid, and gaseous phenomena such as smoke.
- PlasticineLab: a differentiable soft-body manipulation simulator and benchmark.
- RoboNinja: a differentiable simulation system for cutting multi-material objects.
- DiSECt: a differentiable simulation engine for autonomous robotic cutting.
- ThinShellLab: a differentiable simulator for manipulating thin-shell materials, such as cloths and papers.
- DaxBench: a deformable object manipulation benchmark with differentiable physics.
- SoftMAC: a differentiable soft body simulation with forecast-based contact model, coupling with articulated rigid bodies and clothes.
- GarmentLab: a physical simulation environment for garment manipulation tasks.
SoftGym
SoftGym is a set of benchmark environments for deformable object manipulation including tasks involving fluid, cloth and rope, simulated using FleX.
Details
SoftGym: Benchmarking Deep Reinforcement Learning for Deformable Object Manipulation





SoftGym is a set of benchmark environments for deformable object manipulation including tasks involving fluid, cloth and rope. It is built on top of the Nvidia FleX simulator and has standard Gym API for interaction with RL agents.
FluidLab
FluidLab and FluidEngine is a fully differentiable and multi-material physics simulation platform, supporting rigid, elastic, plastic materials, inviscid and viscous liquid, and gaseous phenomena such as smoke.
Details
FluidLab: A Differentiable Environment for Benchmarking Complex Fluid Manipulation
FluidLab is a simulation environment with a diverse set of manipulation tasks involving complex fluid dynamics. These tasks address interactions between solid and fluid as well as among multiple fluids. FluidLab is powered by its underlying physics engine, FluidEngine, providing GPU-accelerated simulations and gradient calculations for various material types and their couplings, extending the scope of the existing differentiable simulation engines.
PlasticineLab
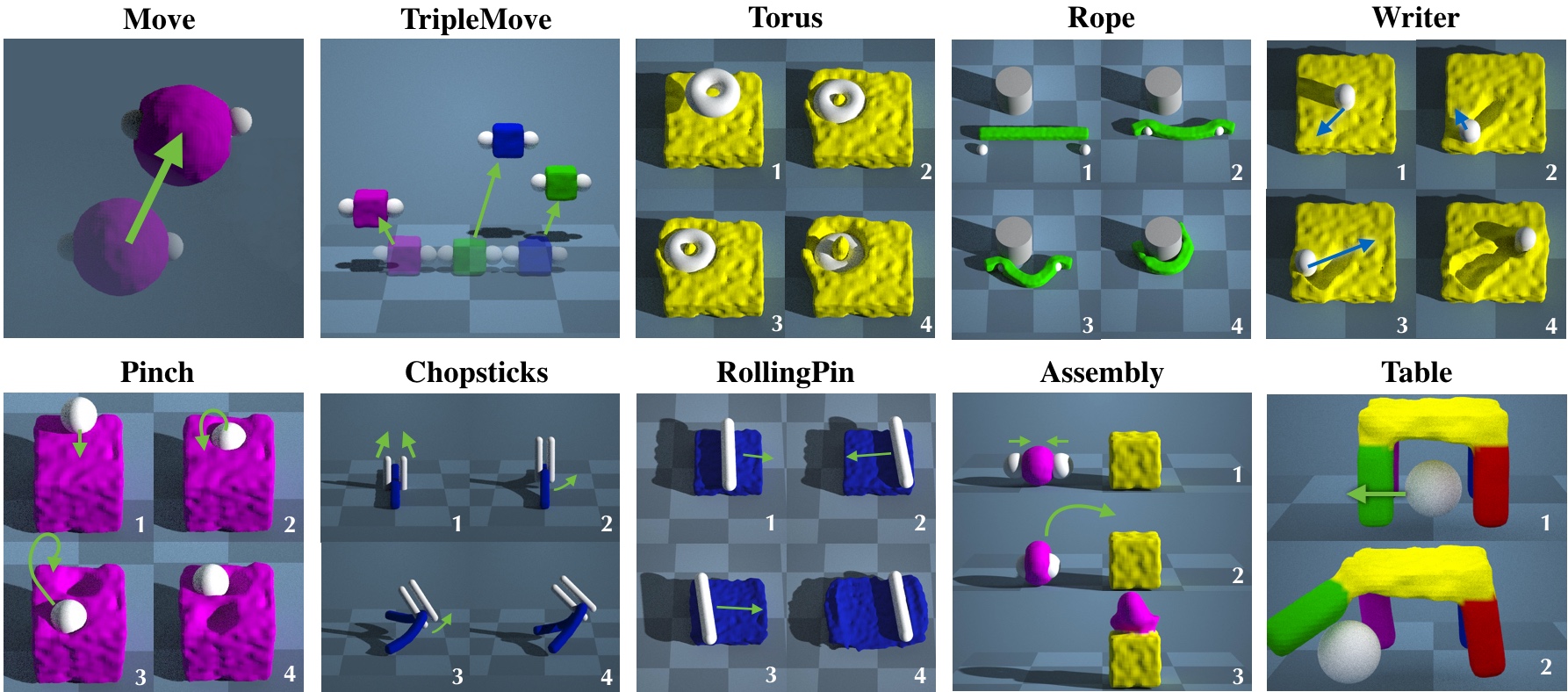
PlasticineLab is a differentiable soft-body manipulation simulator and benchmark.
Details
PlasticineLab: A Soft-Body Manipulation Benchmark with Differentiable Physics
RoboNinja
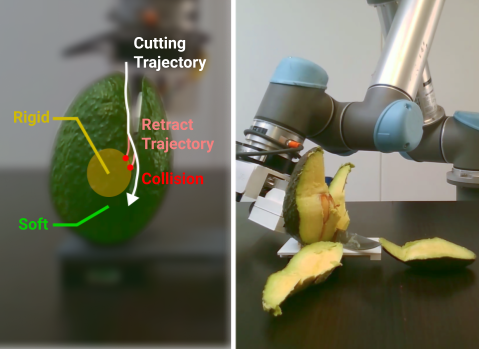
RoboNinja is a differentiable simulation system for cutting multi-material objects.
Details
RoboNinja: Learning an Adaptive Cutting Policy for Multi-Material Objects
DiSECt
DiSECt is a differentiable simulation engine for autonomous robotic cutting.
Details
DiSECt
DiSECt is a simulator for the cutting of deformable materials. It uses the Finite Element Method (FEM) to simulate the deformation of the material, and leverages a virtual node algorithm to introduce springs between the two halves of the mesh being cut. These cutting springs are weakened in proportion to the knife forces acting on the material, yielding a continuous model of deformation and crack propagation. By leveraging source code transformation, the back-end of DiSECt automatically generates CUDA-accelerated kernels for the forward simulation and the gradients of the simulation inputs. Such gradient information can be used to optimize the simulation parameters to achieve accurate knife force predictions, optimize cutting actions, and more.
ThinShellLab
ThinShellLab is a differentiable simulator for manipulating thin-shell materials, such as cloths and papers.
Details
ThinShellLab: Thin-shell Object Manipulations with Differentiable Physics Simulations

-purple)
ThinShellLab is a fully differentiable simulation platform tailored for robotic interactions with diverse thin-shell materials possessing varying material properties, enabling flexible thin-shell manipulation skill learning and evaluation. This comprehensive endeavor encompasses a triad of experiment task categories, which are as follows: manipulation tasks, inverse design tasks, and real-world experiments.DaxBench
DaxBench is a deformable object manipulation benchmark with differentiable physics.
Details
DaxBench: Benchmarking Deformable Object Manipulation with Differentiable Physics


SoftMac
SoftMac is a differentiable soft body simulation with forecast-based contact model, coupling with articulated rigid bodies and clothes.
Details
SoftMac

GarmentLab
GarmentLab is a garment simulation environment based on the physical engine of Isaac Sim, supporting more than 10 garment manipulation tasks. This environment supports the simulation and coupling of deformable objects (garments of more than 10 categories, fluid and blow), articulated objects and rigid objects.
Details
GarmentLab
