Tactile Simulators
Overview
- Taxim: an example-based simulator for GelSight tactile sensors and its variations.
- DiffRedMax: a differentiable simulator with penalty-based contact model and supports implicit time integration.
- TACTO: a fast, flexible, and open-source simulator for vision-based tactile sensors.
- Tactile-Gym: is a suite of simulated environments tailored towards tactile robotics and reinforcement learning.
- DiffTactile: a physics-based and fully differentiable tactile simulation system designed to enhance robotic manipulation with dense and physically-accurate tactile feedback.
- FOTS: is a fast optical tactile simulator with multi-layer perceptron mapping, planar shadow generation, and marker distribution approximation.
- SimTacLS: is a multiphysics simulation pipeline, which considers the mechanical properties of external physical contact and realistic rendering of tactile images in a simulation environment.
Taxim
Taxim is an example-based simulator for GelSight tactile sensors and its variations.
Details
Taxim: An Example-based Simulation Model for GelSight Tactile Sensors


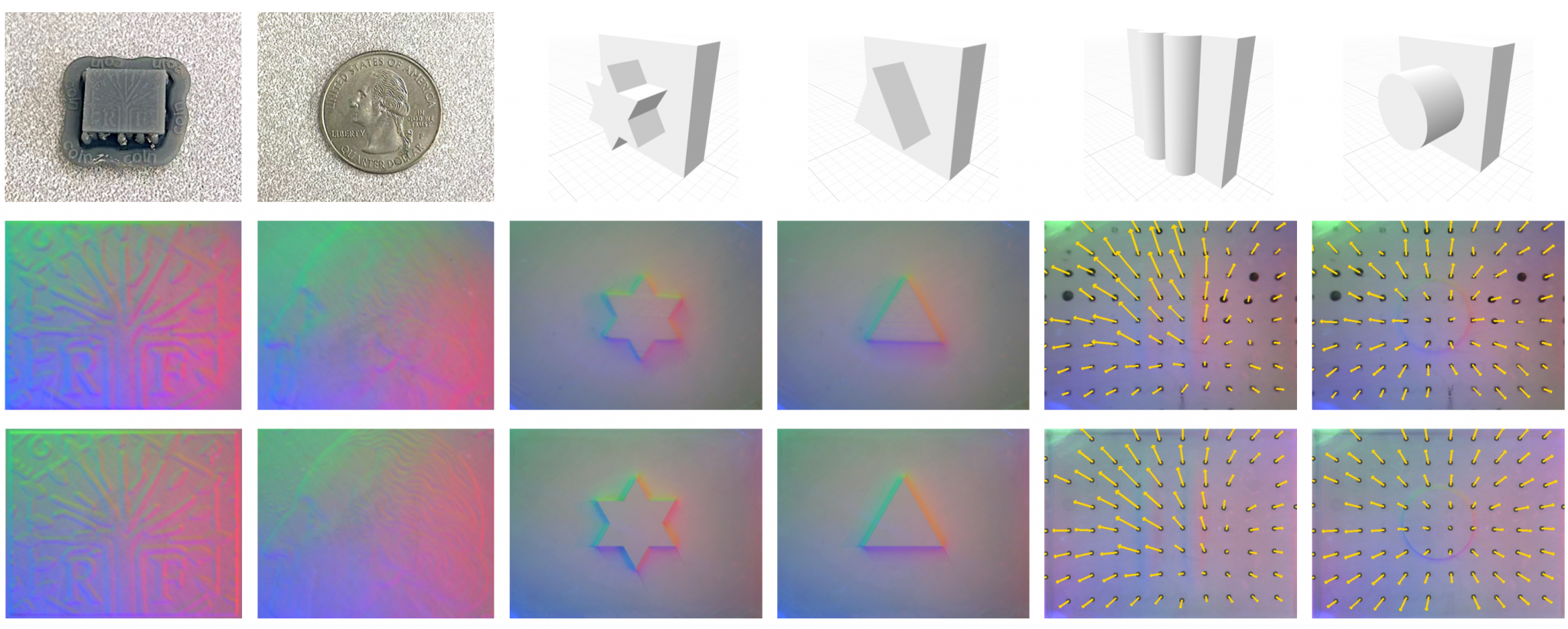
Taxim is a realistic and high-speed simulation model for a vision-based tactile sensor, GelSight. Our simulation framework is the first to incorporate marker motion field simulation together with the optical simulation. We simulate the optical response to the deformation with a polynomial lookup table. This table maps the deformed geometries to pixel intensity sampled by the embedded camera. We apply the linear elastic deformation theory and the superposition principle to simulate the surface markers’ motion that is caused by the surface stretch of the elastomer. The example-based approach requires less than 100 data points from a real sensor to calibrate the simulator and enables the model to easily migrate to other GelSight sensors or their variations.
DiffRedMax (previously DiffHand)
DiffRedMax is a differentiable simulator with penalty-based contact model and supports implicit time integration.
Details
DiffHand: Efficient Tactile Simulation with Differentiability for Robotic Manipulation




DiffRedMax is a differentiable simulator with penalty-based contact model and supports implicit time integration. It also supports simulating dense tactile force field of both normal and shear directional tactile forces. It also provides the analytical first-order simulation gradients with respect to all the control input and simulation parameters (including kinemactics and dynamics parameters).
TACTO
TACTO is a fast, flexible, and open-source simulator for vision-based tactile sensors.
Details
TACTO: A Fast, Flexible, and Open-source Simulator for High-Resolution Vision-based Tactile Sensors

Tactile-Gym
Tactile-Gym is a suite of simulated environments tailored towards tactile robotics and reinforcement learning.
Details
Tactile Gym 2.0: Sim-to-Real Deep Reinforcement Learning for Comparing Low-Cost High-Resolution Robot Touch

DiffTactile
DiffTactile is a physics-based and fully differentiable tactile simulation system designed to enhance robotic manipulation with dense and physically-accurate tactile feedback.
Details
DiffTactile: A Physics-based Differentiable Tactile Simulator for Contact-rich Robotic Manipulation
-purple)

DiffTactile is a physics-based and fully differentiable tactile simulation system designed to enhance robotic manipulation with dense and physically-accurate tactile feedback. In contrast to prior tactile simulators which primarily focus on manipulating rigid bodies and often rely on simplified approximations to model stress and deformations of materials in contact, DiffTactile emphasizes physics-based contact modeling with high fidelity, supporting simulations of diverse contact modes and interactions with objects possessing a wide range of material properties.
FOTS
FOTS is a fast optical tactile simulator with multi-layer perceptron mapping and planar shadow generation to simulate the optical response, along with marker distribution approximation to model the motion of surface markers.
Details
FOTS: A Fast Optical Tactile Simulator for Sim2Real Learning of Tactile-Motor Robot Manipulation Skills
FOTS (Fast Optical Tactile Simulator) is a fast simulator designed for optical tactile sensors. It leverages multi-layer perceptron mapping and planar shadow generation to simulate the optical response, while employing marker distribution approximation to model the motion of surface markers induced by elastomer deformation. Compared to prior work, FOTS improves image generation quality and rendering speed, achieving 28.6 fps for optical simulation and 326.1 fps for marker motion simulation on a single CPU, without requiring GPU acceleration.
SimTacLS
SimTacLS is a multiphysics simulation pipeline, which considers the mechanical properties of external physical contact and realistic rendering of tactile images in a simulation environment.
Details
Simulation, Learning, and Application of Vision-Based Tactile Sensing at Large Scale

SimTacLS is simulation pipeline toward a framework for a large-scale marker-cum-vision-based tactile sensor that employs the physics engine SOFA1 to describe complex physical interactions of deformable bodies based on the finite-element method (FEM).