Frequently Asked Questions
I Can't Find the Docs !!!
Isaac Sim is under active development, whose latest documentation could change. As a result, links you find on search engines may only belong to an older version of documentation, which causes a 404 error.
Our recommondendation is to always start from this main page for the latest version of the documentation, and use the built-in searching.
Camera Intrinsics Error
In Isaac Sim 2022.2.1, the built-in camera API for computing the intrinsics matrix has a bug:
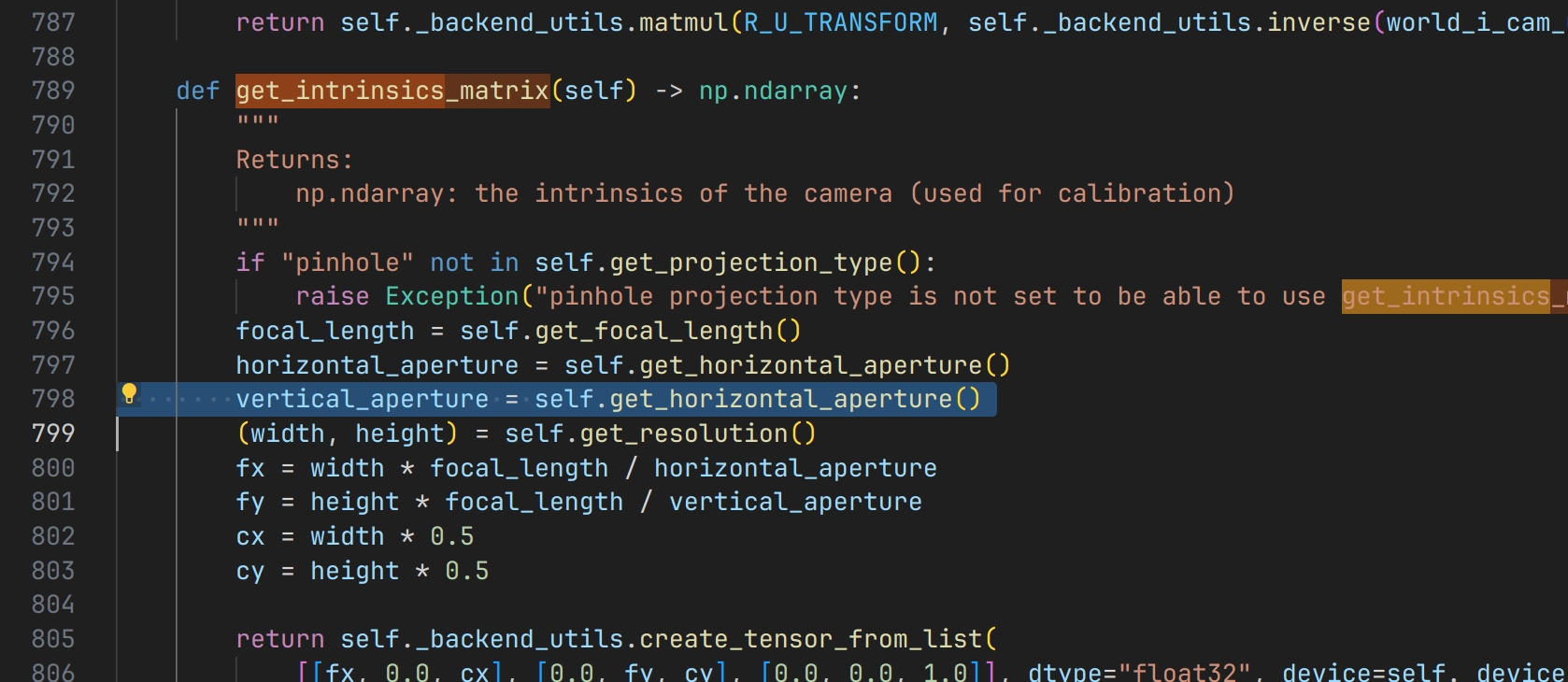
You can fix it in ~/.local/share/ov/pkg/isaac_sim-2022.2.1/exts/omni.isaac.sensor/omni/isaac/sensor/scripts/camera.py by changing get_horizontal_aperture to get_vertical_aperture.
Surface Gripper Bug
In Isaac Sim 2022.2.0, and Isaac Sim 2022.2.1 the built-in surface gripper will crash the simulation if attemping to grasp the grondplane or other robots. You can have a workaround as described in this thread.
Reacheable space for robots
If using the default RMPflow motion generation to contorl robots, the reachable space do not match the reachable space in the URDF. It actaully uses a simplifed collision file. Therefore, if attemping to fully utilize the reachable space, there is a need to modify the collision file as in this thread