Frequently Asked Questions
Couldn't fine camera with handle -1 in environment 0
Issue background
It seems like something is wrong when I try to use point cloud observation in the task. Specifically, using the camera through isaacgym API may have some bugs. I print the 'camera_handle', whose value is -1.

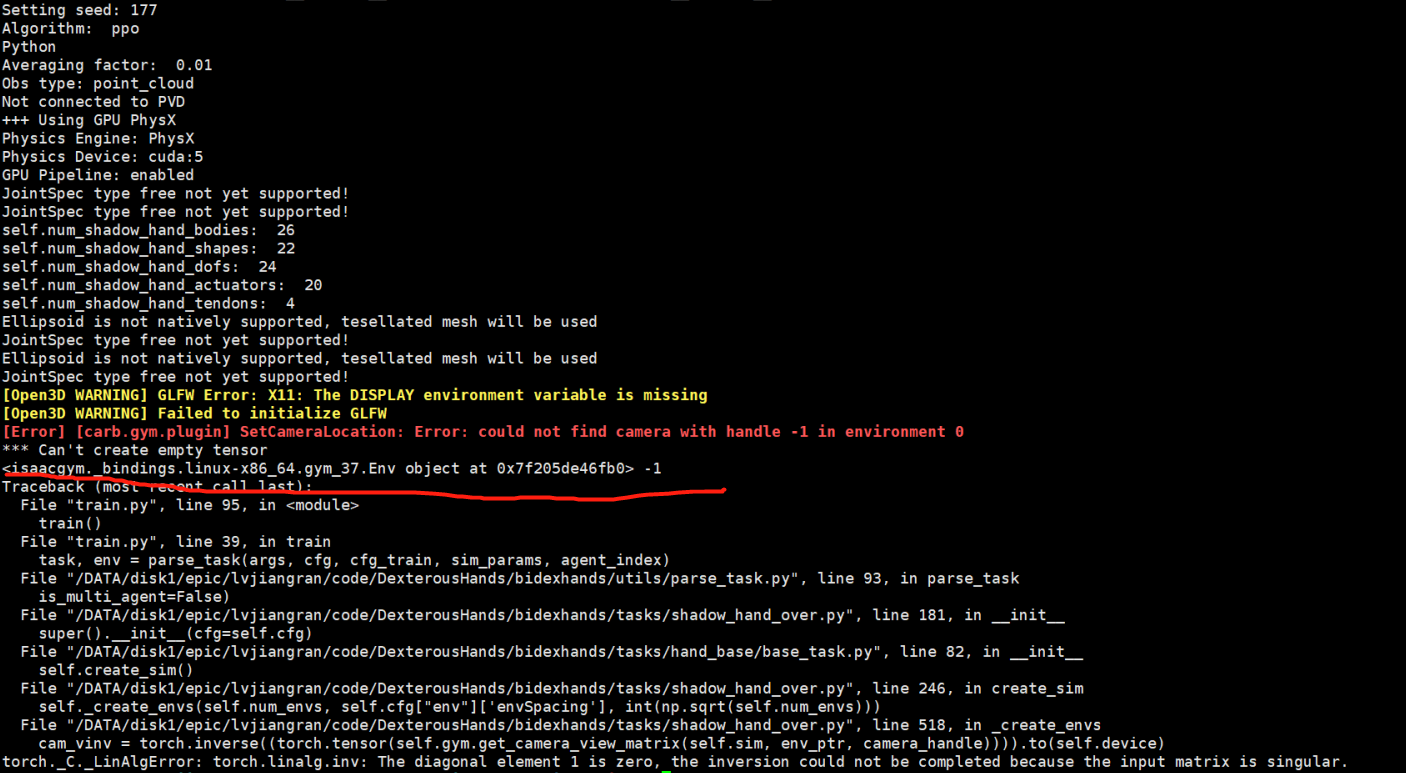
Solution
Errors that return -1 generally appear when using isaacgym on servers without a monitor. Using --headless may also cause this bug. Currently, isaacgym has many bugs with rendering, maybe you can also go to the isaacgym official forum to find some answers.
Segmentation fault (core dumped) in Docker
Issue background
Device NVIDIA A100 40GB PCIe GPU Accelerator
Method: Docker
Details:
At the end of the RL training process in Isaac Gym, it shows error in console as following.
Segmentation fault (core dumped)
Solution
We can use faulthandler to locate your problem. As the docker don't haver a graphic viewer,s o we need to set the parameter "headless" as True.
ValueError: The parameter loc has invalid values
Issue background
I am unable to run the training in IsaacGym without getting the following error:
Traceback (most recent call last):
File "train.py", line 95, in <module>
train()
File "train.py", line 47, in train
sarl.run(num_learning_iterations=iterations, log_interval=cfg_train["learn"]["save_interval"])
File "/media/data/users/erez/repos/bi-dexhands/main/bi-dexhands/algorithms/rl/ppo/ppo.py", line 142, in run
actions, actions_log_prob, values, mu, sigma = self.actor_critic.act(current_obs, current_states)
File "/media/data/users/erez/repos/bi-dexhands/main/bi-dexhands/algorithms/rl/ppo/module.py", line 77, in act
distribution = MultivariateNormal(actions_mean, scale_tril=covariance)
File "/home/ubuntu/miniconda3/envs/bidexhands/lib/python3.7/site-packages/torch/distributions/multivariate_normal.py", line 146, in __init__
super(MultivariateNormal, self).__init__(batch_shape, event_shape, validate_args=validate_args)
File "/home/ubuntu/miniconda3/envs/bidexhands/lib/python3.7/site-packages/torch/distributions/distribution.py", line 53, in __init__
raise ValueError("The parameter {} has invalid values".format(param))
ValueError: The parameter loc has invalid values
No matter what I tried (various versions of python/pytorch/cuda/nvidia drivers), this error always pops-up in an undeterminitic manner (i.e. not the same iteration).
The environment I was using, that resulted with the attached traceback:
- Python 3.7
- Pytorch 1.8.1
- Torchvision 0.9.1
- CudaToolkit 11.1.1
Solution
Yeah it's an isaacgym bug, we encountered it when we were using it. We believe that this is a bug caused by the instability of the isaacgym physics engine when dealing with collisions, so that the observations have a nan value, which leads to an error in the neural network training. Details can be found in isaacgym devtalk forum.
Unfortunately, since this is an isaacgym issue, I don't think there is a way to fully fix this bug right now. However, I think that two methods can be taken to deal with it temporarily: 1) When the nan value appears in the obs and reward in the input of the neural network, ignore it to ensure that the training can be performed normally temporarily. 2) Referring to the nvidia official recommendation, adjust the simulation parameters to reduce the probability of this bug. I feel that the following adjustments can reduce this bug better, you can try to see if it helps:
Open the environment parameter file and see the sim part: (such as https://github.com/PKU-MARL/DexterousHands/blob/main/bi-dexhands/cfg/shadow_hand_push_block.yaml)
sim:
substeps: 2
physx:
num_threads: 4
solver_type: 1 # 0: pgs, 1: tgs
num_position_iterations: 8
num_velocity_iterations: 0
contact_offset: 0.002
rest_offset: 0.0
bounce_threshold_velocity: 0.2
max_depenetration_velocity: 1000.0
default_buffer_size_multiplier: 5.0
flex:
num_outer_iterations: 5
num_inner_iterations: 20
warm_start: 0.8
relaxation: 0.75
I found that lowering the numposition_iterations parameter helped with this, so adjusted it to below:
sim:
substeps: 2
physx:
num_threads: 4
solver_type: 1 # 0: pgs, 1: tgs
num_position_iterations: 4
num_velocity_iterations: 0
contact_offset: 0.002
rest_offset: 0.0
bounce_threshold_velocity: 0.2
max_depenetration_velocity: 1000.0
default_buffer_size_multiplier: 5.0
flex:
num_outer_iterations: 5
num_inner_iterations: 20
warm_start: 0.8
relaxation: 0.75